(RAL 22) Tactile Gym 2.0 Sim-to-Real Deep Reinforcement Learning for Comparing Low-Cost High-Resolution Robot Touch
(RAL 22) Tactile Gym 2.0 Sim-to-Real Deep Reinforcement Learning for Comparing Low-Cost High-Resolution Robot Touch
望秋弥茂Abstract 摘要
[!Abstract] 研究背景
- 高分辨率光学触觉传感器在机器人学习环境中越来越受欢迎
- 触觉机器人平台、专业模拟软件和缺乏通用性的sim-to-real方法的成本很高
[!Todo] 研究目的
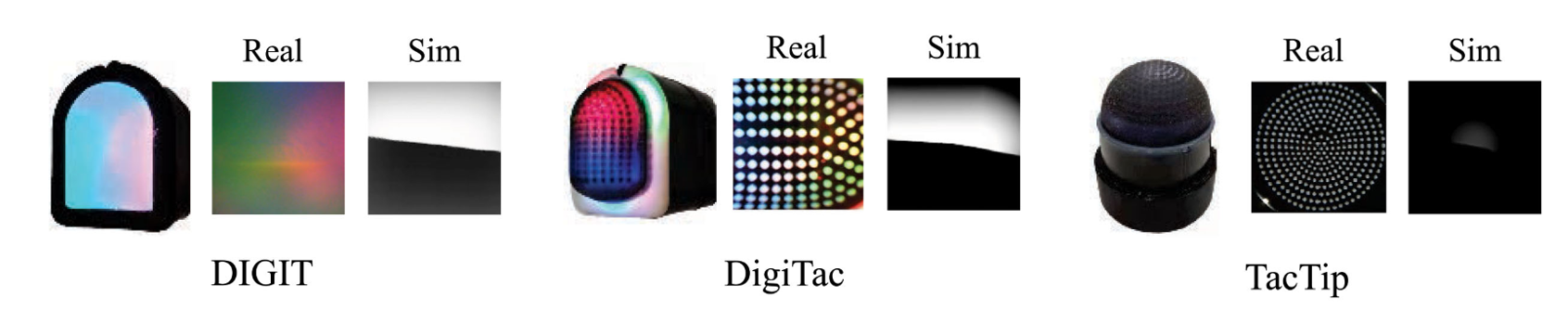
- 扩展Tactile Gym模拟器,包括三种新的光学触觉传感器(TacTip、DIGIT和DigiTac)
- 证明单一的Sim-to-Real方法可以用于这些不同的传感器以实现强大的现实世界性能
Contribution 主要贡献
[!Success] 主要贡献
- Tactile Gym扩展:将Tactile Gym从单一触觉传感器扩展到三种低成本、高分辨率光学触觉传感器。
- 实验验证:在三个需要触觉的物理交互任务(物体推动、边缘跟随和表面跟随)上验证了扩展环境。
- Object Pushing
- Edge Following
- Surface Following
- 降低门槛:通过适配到一个便宜的4-DoF机器人臂(DOBOT MG400)上,进一步促进了这一基准的传播
Relative Work 相关工作
[!example] 相关工作
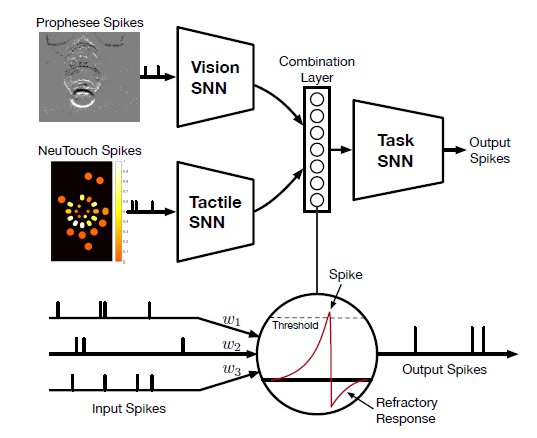
- DRL in Tactile Robotics:已被证明在解决许多顺序决策问题上是成功的
- Tactile Sim-to-Real Transfer:两种主要方向来缩小触觉的Sim-to-Real差距
- 使用有限元(Finite Element)方法来模拟传感器变形动力学
- 利用图像渲染(Image Rendering)方法来复现感官数据
Method and Experiment 方法与实验
A. Tactile Robot System 触觉机器人系统
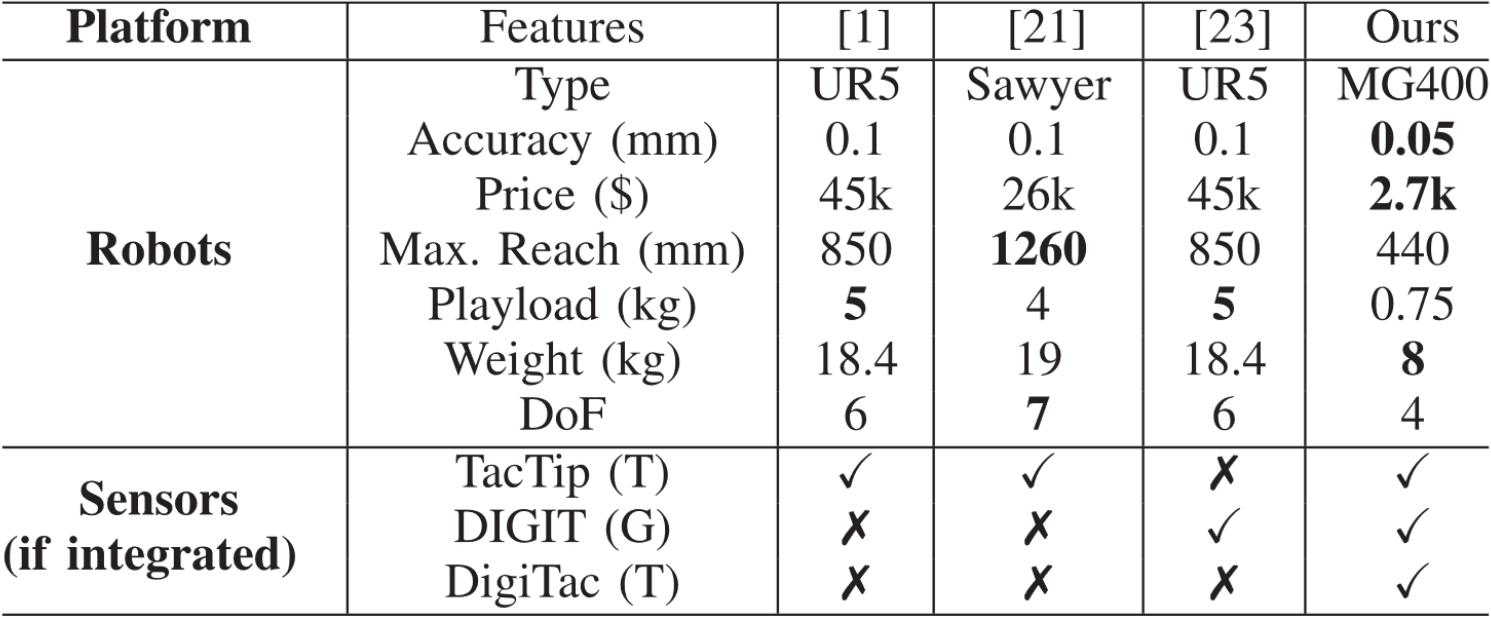
[!info] 不同触觉仿真器的对比
[1] Tactile-Gym – (CoRL 22) Tactile Sim-to-Real Policy Transfer via Real-to-Sim Image Translation
[21] No Name by Unity – (ICRA 20) Sim-to-real transfer for optical tactile sensing
[23] Taxim – (RAL 22) Taxim: An Example-Based Simulation Model for GelSight Tactile Sensors
B. Tactile Sim-to-Real Deep RL Framework 触觉Sim-to-Real深度强化学习框架
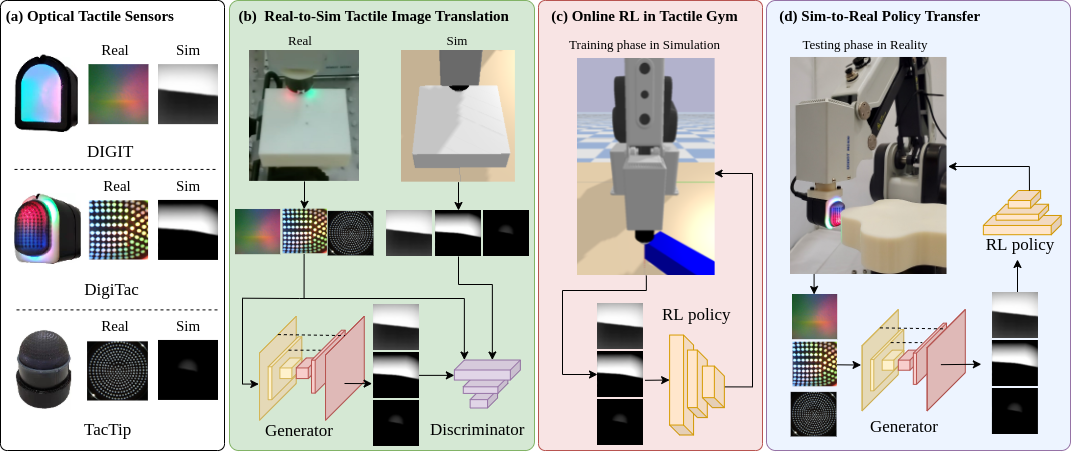
[!todo] Framework
- Online Learning
- Domain Adaption
- Zero-Shot Sim-to-Real
1. Optical Tactile Sensors 光学触觉传感器
2. Real-to-Sim Tactile Image Transition 触觉图像转换
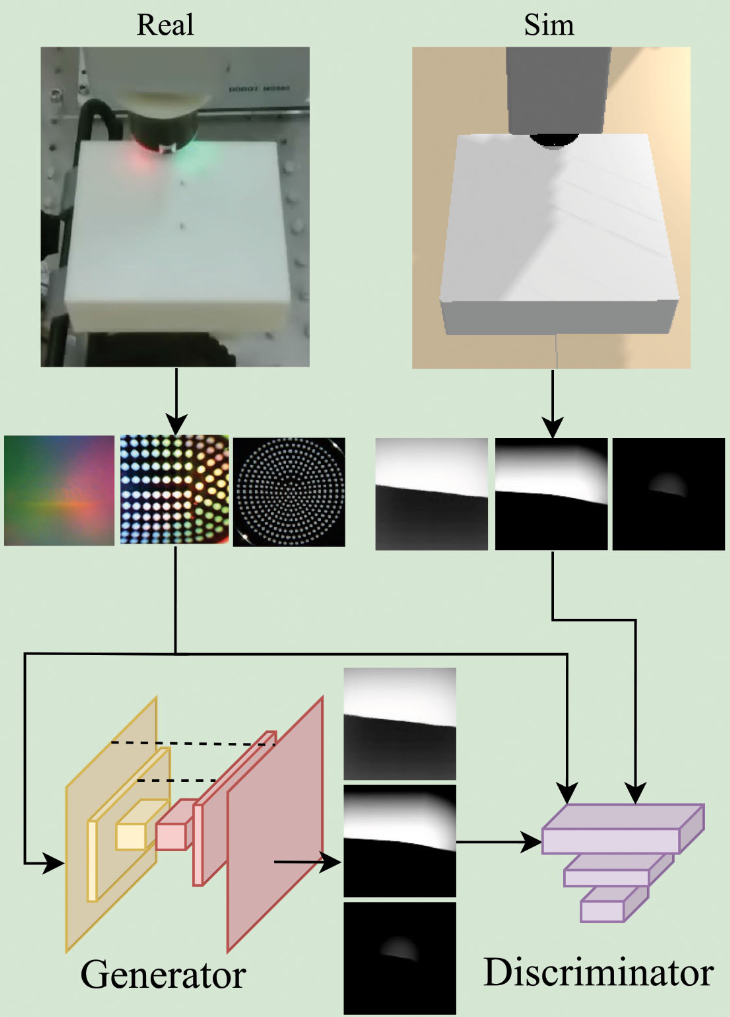
3. Online RL in Tactile Gym 在线强化学习
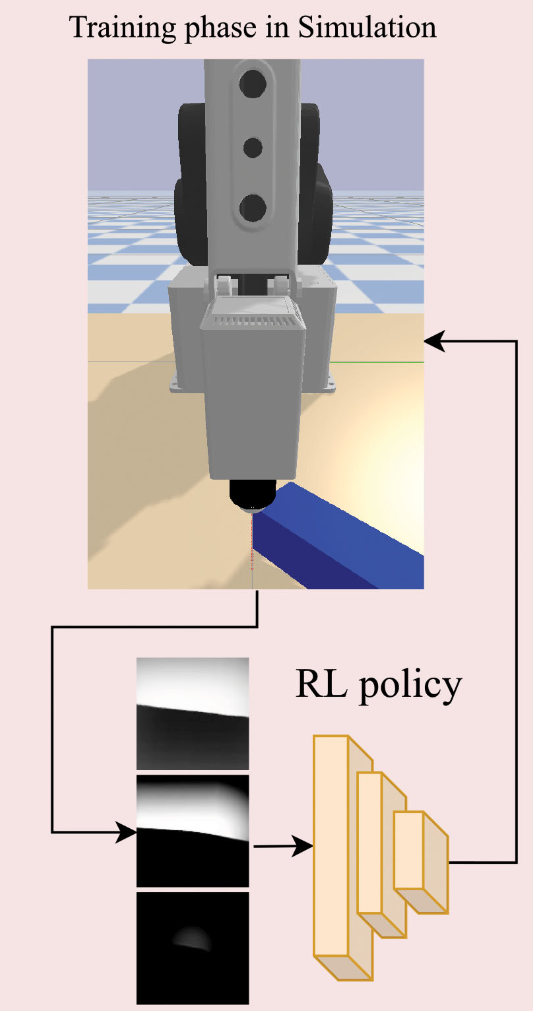
4. Sim-to-Real Policy Transfer 策略迁移
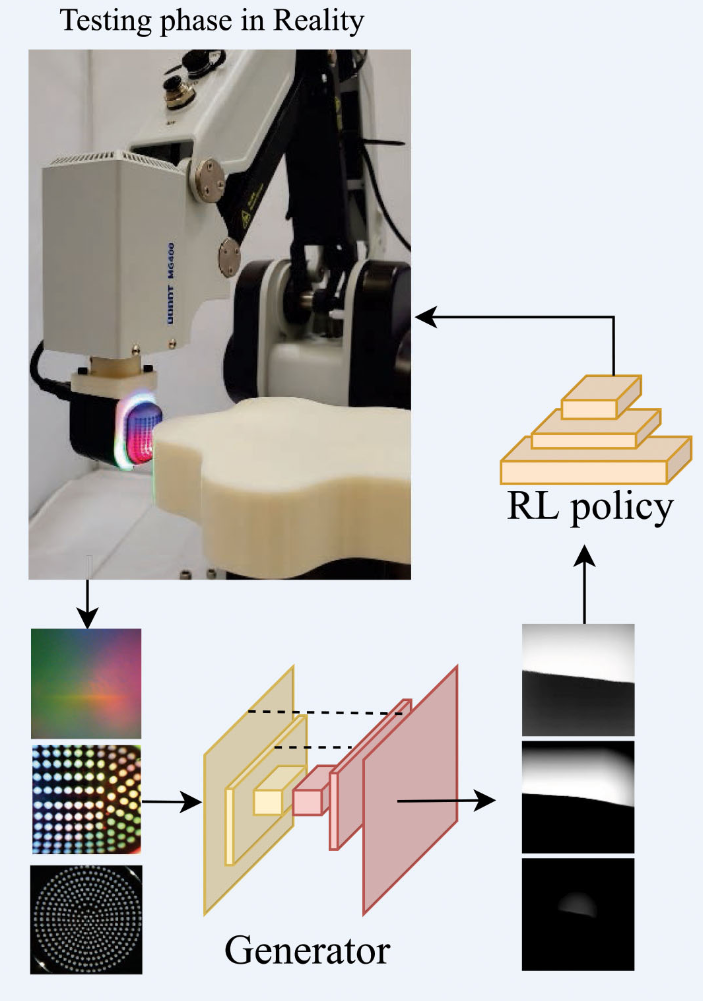
DOBOT MG400

原创(RAL 22) Tactile Gym 2.0 Sim-to-Real Deep Reinforcement Learning for Comparing Low-Cost High-Resolution Robot Touch
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 望秋弥茂!

最近发布